
적재라인
적재라인 | 로보트 팔레타이저





▣ 제품동영상
MANIPULATOR SPECIFICATIONS |
||
| ITEMS | SPECIFICATIONS | |
| Model | MOTOMAN-MPL160Ⅱ | |
| Type *1 | YR-MPL0160-J00 | |
| Motion control | 4 (Vertically articulated) | |
| Payload | 160 kg | |
| Repeatability *2 | ± 0.5mm | |
| Range of Motion | S-axis (turnig) | -180˚ ~ +180˚ |
| L-axis (lower arm) | -45˚ ~ +90˚ | |
| U-axis (upper arm) | -120˚ ~ +15.5˚ | |
| T-axis (wrist arm) | -360˚ ~ +360˚ | |
| Allowable Inertia(GD24) | T-axis (wrist arm) | 80 kg·m2 |
| Approximately Mass | 1700 kg | |
| Ambient Conditions | Temperature | 0℃ to +45℃ |
| Humidity | 20 ~ 80 %RH(non-condensing) | |
| Vibration | 4.9 m/s2 or less | |
| Others |
|
|
| Power Requirements *3 | 9.5 kVA | |
*1 : Models using food-grade lubricant for food machinery are also abaiable as options. Models using food-grade lubricant for food machinery have speed limits.
*2 : Conforms to ISO 9283
*3 : Varies in accordance with applications and motion patterns.
Note : SI units are used for specifications.


▶ FEATURES
- M-410iC는 팔레타이징 시스템의 로봇화에 기여하는 지능형 팔레타이징 로보트입니다.
- 적합한 로봇 모델은 작업물에 따라 선택이 가능합니다.
- M-410iC/110은 작은 사이즈의 바디와 높은 처리용량을 자랑합니다.
- M-410iC/185, /315 및 /500은 두종류의 베이스를 지원합니다. (페데스탈형 베이스 / 소형 베이스)
- M-410iC/185, /315 및 /500에는 그리퍼에 용이한 배선이 가능하게 하는 홀로우 리스트(Hollow wrist, 속이 빈 관절)가 있습니다.
- iRVision(통합버전)과 같은 첨단 지능을 가진 옵션을 선택할 수 있습니다.
SPECIFICATIONS |
|||
| ITEMS | M-410iC / 185 | M-410iC / 315 | |
| Type | Ariculated Type | ||
| Controlled axes | 4 axex(J1, J2, J3, J4) | ||
| Reach | 3143mm | ||
| Installation | Floor | ||
| Motion range (Maximum speed) (Note 1) |
J1 axis rotation | 360˚(140˚/s) / 6.25 rad(2.44 rad/s) | 360˚(90˚/s) / 6.28 rad(1.57 rad/s) |
| J2 axis rotation | 144˚(140˚/s) / 2.51 rad(2.44 rad/s) | 144˚(100˚/s) / 2.51 rad(1.75 rad/s) | |
| J3 axis rotation | 136˚(140˚/s) / 2.37 rad(2.44 rad/s) | 136˚(100˚/s) / 2.37 rad(1.92 rad/s) | |
| J4 axis wrist rotation | 720˚(305˚/s) / 12.57 rad(5.32 rad/s) | 720˚(195˚/s) / 12.57 rad(3.40 rad/s) | |
| Max. load capacity at wrist | 185 kg | 315 kg | |
| Max. load capacity at J2 base | 550 kg | ||
| Max. load capacity at J3 arm (Note 2) | 30 kg | ||
| Allowable load inertia at wrist | 88 kg·㎡ / 989 kgf·㎝·s2ㄹ | 155 kg·㎡ / 1580 kgf·㎝·s2ㄹ | |
| Drive method | Electric servo drive by AC servo motor | ||
| Repeatability (Note 3) | ± 0.05mm | ||
| Mass | Pedestal type | 1600 kg (Note 4) | |
| no pedestal | 1330 kg (Note 5) | ||
| Installation environment | Ambient temperature : 0 to 45℃ Ambient humidity : Normally 75%RH or less(No dew, nor frost allowed) / Short term Max 95%RH or less(within one month) Vibration acceleration : 4.9 m/s2(0.5G) or less |
||
Note 1 : During short distance motions, the axis speed may not reach the maximun value stated.
Note 2 : Max. payload capacity at wrist are changed by wrist load.
Note 3 : Compliant with ISO 9283.
Note 5 : Controller mass(120kg) is not included.

▶ FEATURES
- 중량을 줄인 기계 장치 및 소형 로보트입니다.
- 강력하면서도 가벼운 암 및 첨단의 동작제어 기술은 동작 성능이 현저하게 향상되어 생산성을 높일 수 있습니다.
- 다양한 공정에 스폿 용접 솔루션 암과 같은 광범위한 옵션을 사용할 수 있습니다.
- R-30iB / R-30iB 플러스 로보트 컨트롤러는 에너지를 절약하고 바닥 설치면적을 줄일 수 있으며, 옵션으로 에너지 재생과 컴팩트한 캐비닛을 특징으로 합니다.
- 학습 로브트, 빈피킹(Bin Picking), 압력센싱(Force Sensing) 및 시선추적(Visual Line Tracking)과 같은 다양한 지능형 기능이 가능합니다.
SPECIFICATIONS |
|||||||
| ITEMS | R-2000iC / 210F | R-2000iC / 165F | R-2000iC / 125L | ||||
| Type | Ariculated Type | ||||||
| Controlled axes | 6 axex(J1, J2, J3, J4, J5, J6) | ||||||
| Reach | 2655mm | 3100mm | |||||
| Installation | Floor | ||||||
| Motion range (Maximum speed) (Note 1) |
J1 axis rotation | 370˚(120˚/s) / 6.46 rad(2.09 rad/s) | 370˚(130˚/s) / 6.46 rad(2.27 rad/s) | ||||
| J2 axis rotation | 136˚(105˚/s) / 2.37 rad(1.83 rad/s) | 136˚(115˚/s) / 2.37 rad(2.01 rad/s) | |||||
| J3 axis rotation | 312˚(110˚/s) / 5.45 rad(1.92 rad/s) | 312˚(125˚/s) / 5.45 rad(2.18 rad/s) | 301˚(125˚/s) / 5.25 rad(2.18 rad/s) | ||||
| J4 axis wrist rotation | 720˚(140˚/s) / 12.57 rad(2.44 rad/s) | 720˚(180˚/s) / 12.57 rad(3.14 rad/s) | |||||
| J5 axis wrist swing | 720˚(140˚/s) / 4.36 rad(2.44 rad/s) | 250˚(180˚/s) / 4.36 rad(3.14 rad/s) | |||||
| J6 axis wrist rotation | 720˚(220˚/s) / 12.57 rad(2.44 rad/s) | 720˚(260˚/s) / 12.57 rad(4.54 rad/s) | |||||
| Max. load capacity at wrist | 210 kg | 165 kg | 125 kg | ||||
| Max. load capacity at J2 base | 550 kg | 550 kg | 550 kg | ||||
| Max. load capacity on J3 arm | 25 kg (A) | (A)+(B) ≦ 50kg | 25 kg (A) | (A)+(B) ≦ 50kg | 25 kg (A) | (A)+(B) ≦ 40kg | |
| Max. load capacity on J3 casing | 50 kg (A) | 50 kg (A) | 40 kg (A) | ||||
| Allowable load moment at wrist | J4 axis | 1360 N·m / 139 kgf·m | 940 N·m / 96 kgf·m | 710 N·m / 72 kgf·m | |||
| J5 axis | 1360 N·m / 139 kgf·m | 940 N·m / 96 kgf·m | 710 N·m / 72 kgf·m | ||||
| J6 axis | 735 N·m / 75 kgf·m | 490 N·m / 50 kgf·m | 355 N·m / 36 kgf·m | ||||
| Allowable load inertia at wrist | J4 axis | 147 kg·㎡ / 1500 kgf·㎝·s2 | 89 kg·㎡ / 908 kgf·㎝·s2 | 72 kg·㎡ / 735 kgf·㎝·s2 | |||
| J5 axis | 147 kg·㎡ / 1500 kgf·㎝·s2 | 89 kg·㎡ / 908 kgf·㎝·s2 | 72 kg·㎡ / 735 kgf·㎝·s2 | ||||
| J6 axis | 82 kg·㎡ / 837 kgf·㎝·s2 | 46 kg·㎡ / 469 kgf·㎝·s2 | 40 kg·㎡ / 408 kgf·㎝·s2 | ||||
| Drive method | Electric servo drive by AC servo motor | ||||||
| Repeatability (Note 2) | ± 0.05mm | ||||||
| Mess (Note 3) | 1090 kg | 1090 kg | 1115 kg | ||||
| Installation environment | Ambient temperature : 0 to 45℃ Ambient humidity : Normally 75%RH or less(No dew, nor frost allowed) / Short term Max 95%RH or less(within one month) Vibration acceleration : 4.9 m/s2(0.5G) or less |
||||||
Note 1 : During short distance motions, the axis speed may not reach the maximun value stated.
Note 2 : Compliant with ISO 9283.
Note 3 : Without controller.






▣ 제품동영상
▶ FEATURES
- 뛰어난 속도와 가반하중으로 작업처리량 극대화
- 대형 사이즈의 팔레탕징 작업을 커버헐 수 있는 암 길이
- 이중공압호스, 전력선 및 필드버스용 케이블이 상하 암 내에 장착됨
- IP67등급으로 열악한 작업 환경에서도 안정된 성능유지
PERFORMANCE |
||
| Position repeatability | 0.1 mm | |
| Path repeatability | 0.3 mm | |
| Axis monements | Workign range IRB 660 | |
| Axis 1 Rotation | +180˚to -180˚ option +220˚ to -220˚ | |
| Axis 2 Arm | +180˚to -42˚ | |
| Axis 3 Arm | +120˚to -20˚ | |
| Axis 6 Arm | +330˚to -300˚Default +150˚rev. to -150˚rev. Max. |
|
SPECIFICATIONS |
||
| Robot versions IRB | Handling capacity | Reach |
| 660-180 / 3.15 | 180 kg | 3.15 mm |
| 660-250 / 3.15 | 250 kg | 3.15 mm |
| Number of axis | 4 | - |
| Protection class | IP 67 | - |
| Mounting | Floor mounted | - |
| IRC5 controller variants | Single cabinet, Dual cabinet | - |
SPECIFICATIONS |
|||||||||||
| MODEL | 축의 구성 | 구동방식 | 유효동작범위 높이방향 | 점유반경 | 최고동작속도 (DEG/S) | 최대가반중량 | 위치조작정밀도 | 위치검출방식 | |||
| J1 Rotation | J2 Arm | J3 | J4 Wrist Turn | ||||||||
| IRB 660 | 4축 | AC Servo | 3150 mm | 2900 mm | 130 | 130 | 130 | 300 | 180 kg | ± 0.5mm | Resolver |
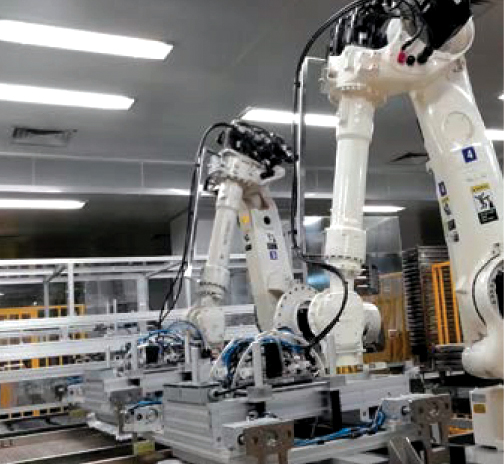
▣ 팔레타이징 시스템 구성 및 적용사례
간단하고 빠른 패선생성 프로그램으로 라인 최적화 및 다양한 Palletizing 패턴에 대응가능!
▲ 종이박스 팔레타이징 시스템
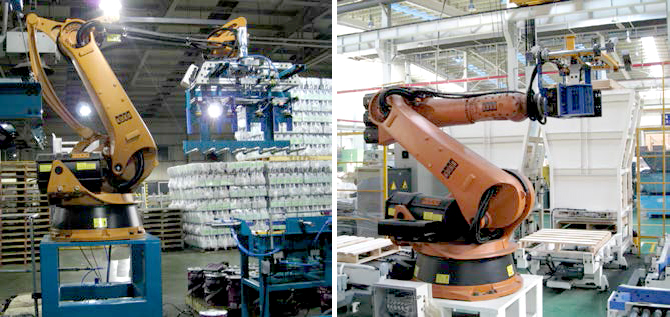
▲ 캔 팔레타이징 시스템

▲ PET병 및 말통 팔레타이징 시스템
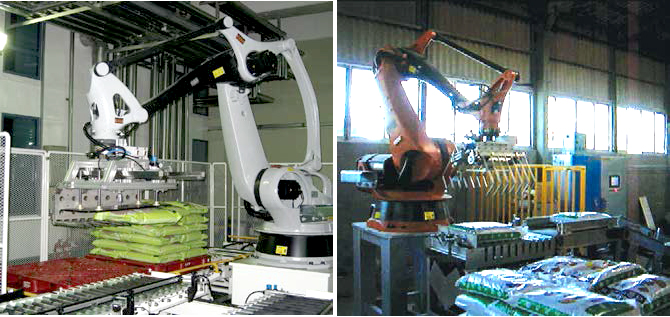
▲ 마대 및 지재 팔레타이징 시스템
▣ 다양한 팔레타이징이 가능한 풍부한 로보트 핸들
▶ 표준핸들

S형(종이박스용)

C형(종이박스용)

KP형(종이박스, 플라스틱케이스 겸용)

F형(종이박스, 플라스틱케이스 겸용)

DA형(종이박스)
F형(Bag용)
▶ 특수핸들
18리터 캔용

폴리케이스용

지대용
건축자재용

폴리케이스용

폴리케이스용

종이케이스용

카톤케이스용

빈박스용

스틸케이스용